Zeke Mohammed
Electrical Engineer | Embedded Systems | PCB Design
B.S. Engineering Physics (Electrical Concentration) | Fordham University | Class of 2026
Queens, NY | U.S. Citizen
B.S. Engineering Physics (Electrical Concentration) | Fordham University | Class of 2026
Queens, NY | U.S. Citizen
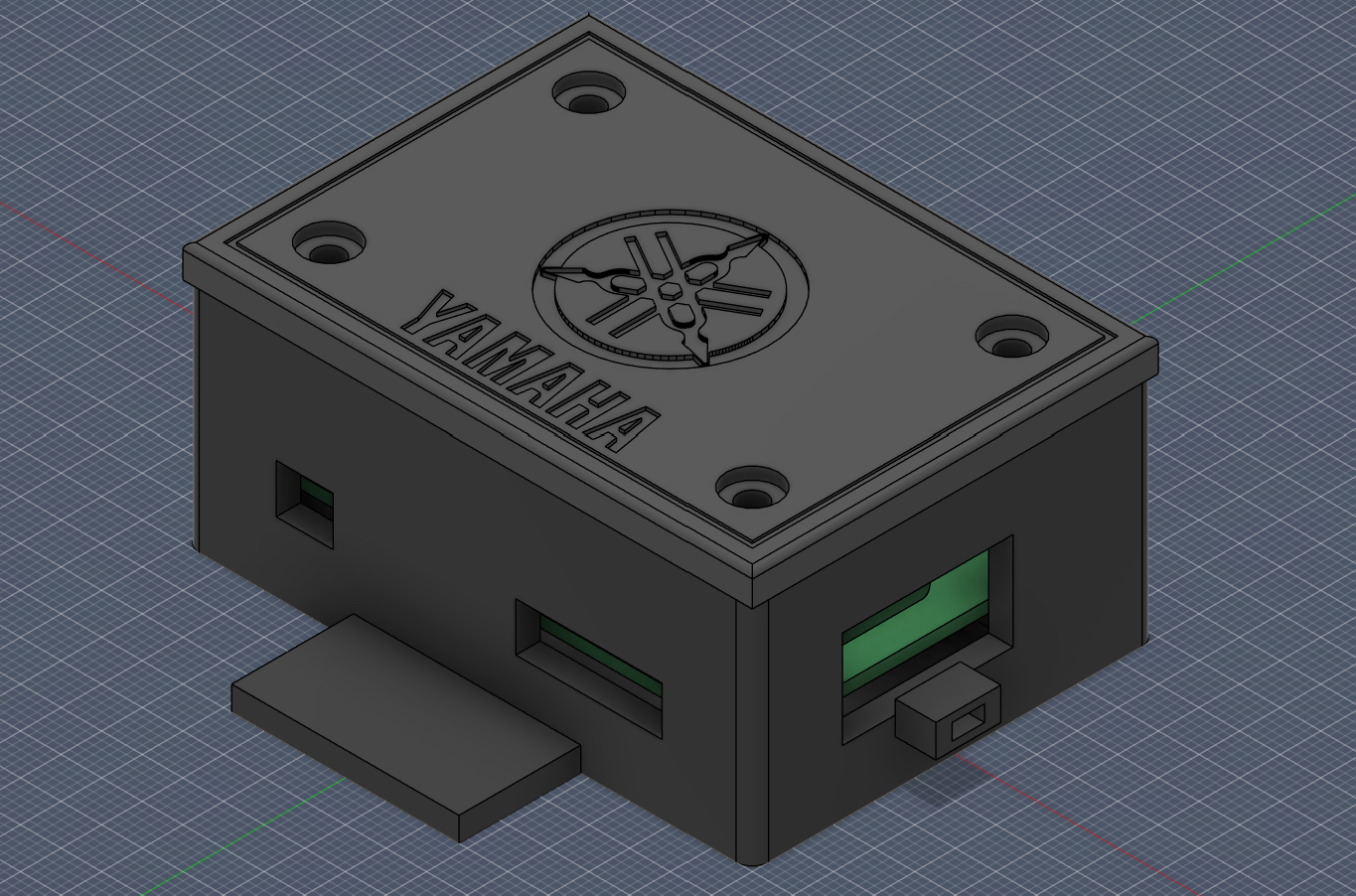
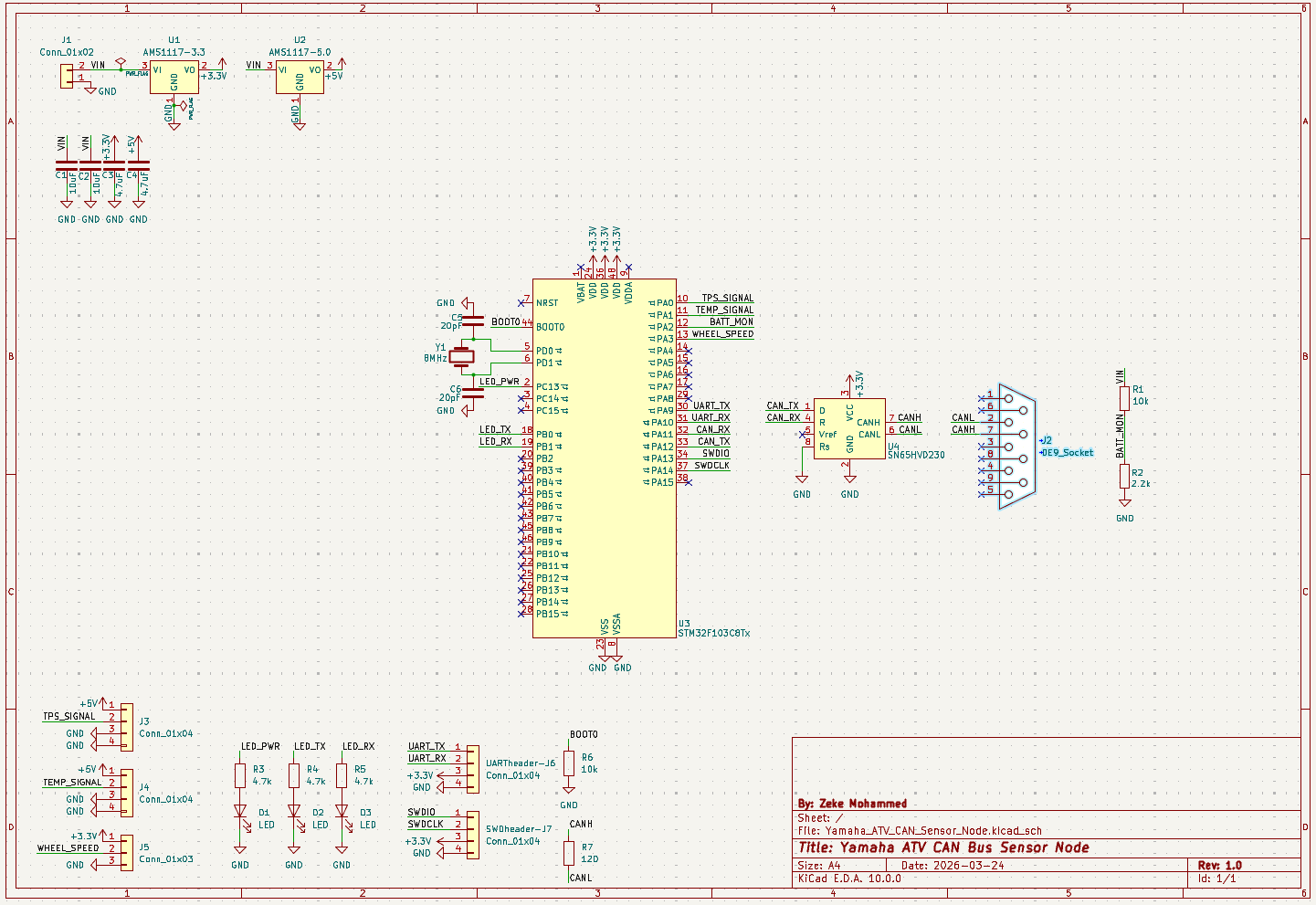
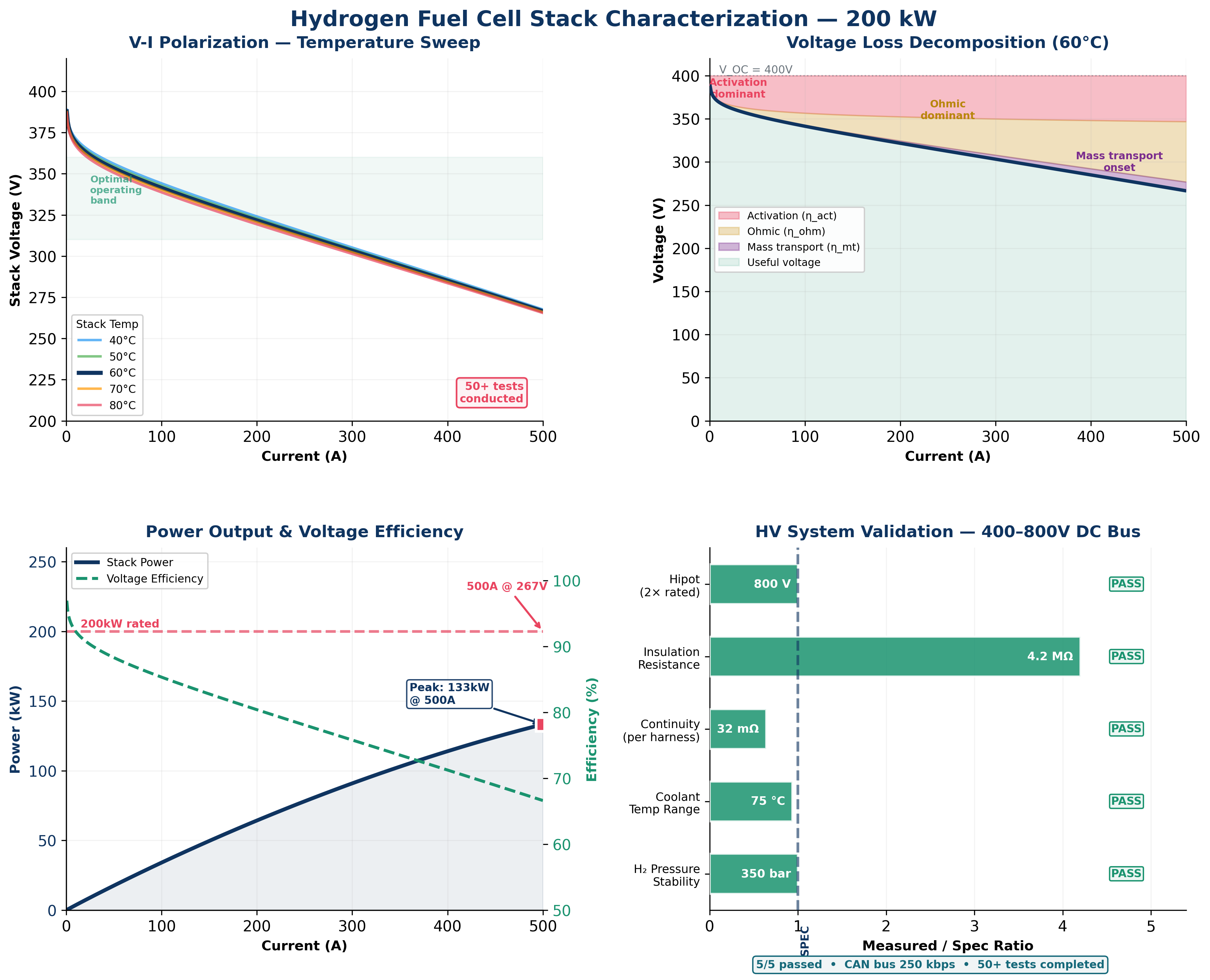
Production-ready PCB design package for a CAN Bus Sensor Node targeting Yamaha Grizzly ATV applications. Aggregates throttle position, coolant temperature, wheel speed, and battery voltage data, transmitting a consolidated CAN frame to the vehicle ECU at 10 Hz over ISO 11898 at 500 kbaud.
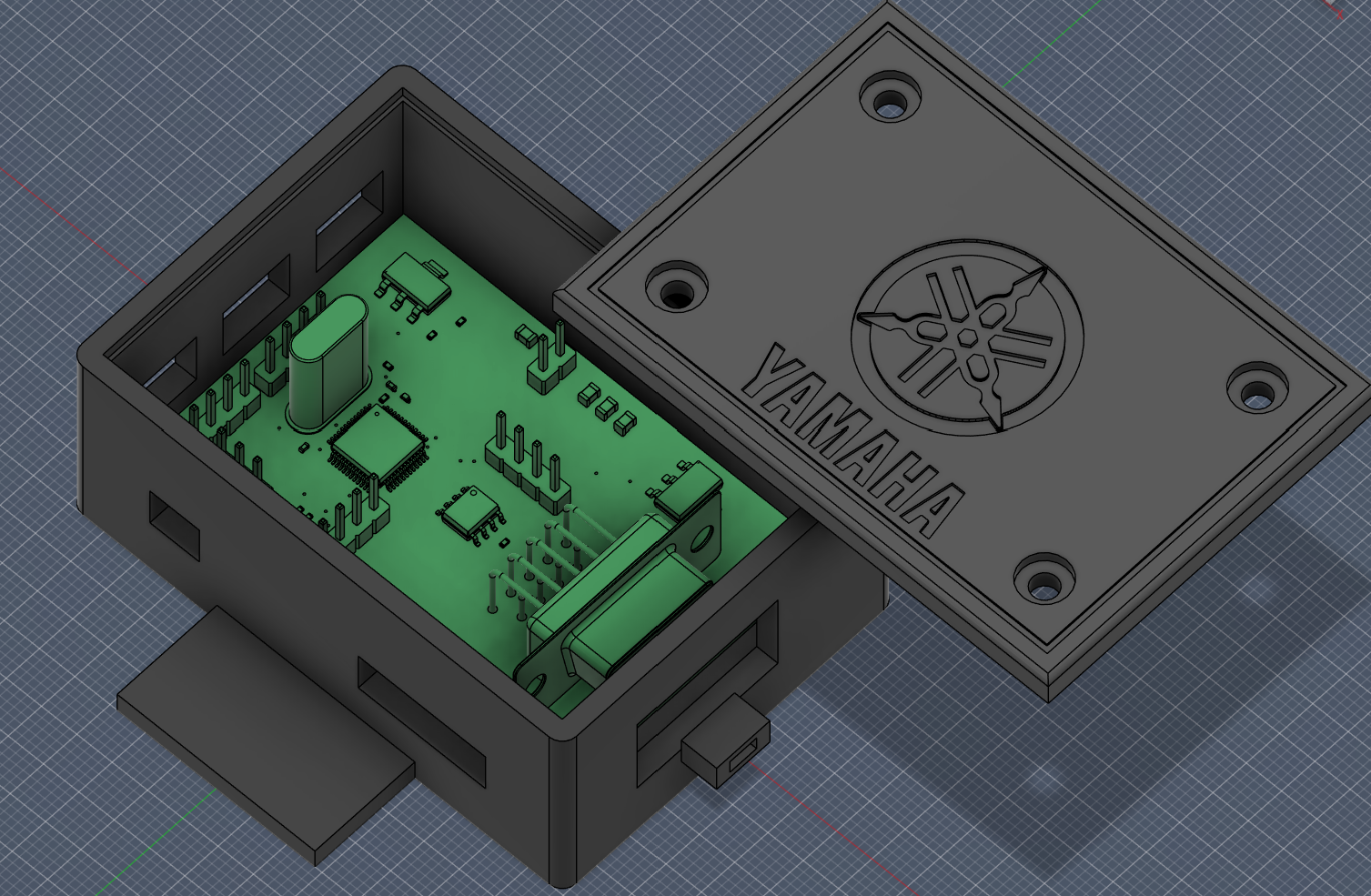
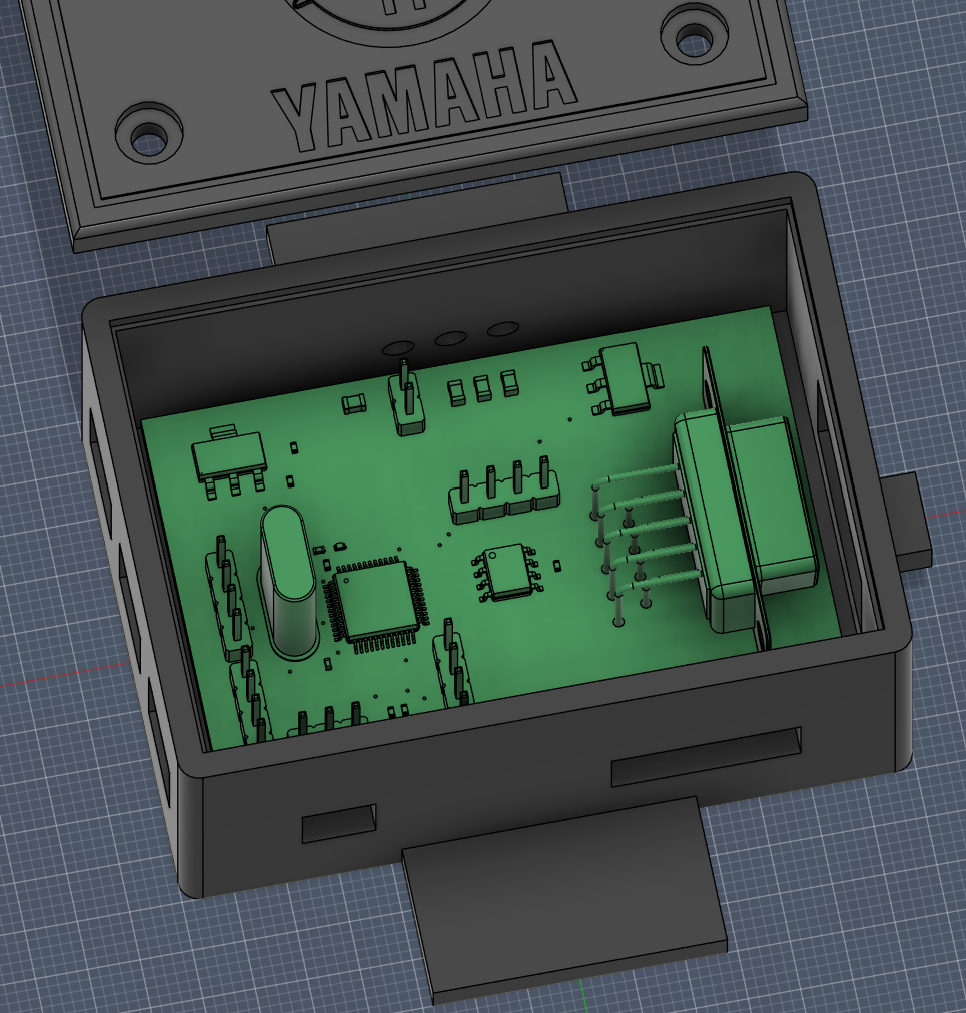
IP67-style ABS housing with M3 PCB standoffs, M6 frame mounting flanges, DB9 and sensor header cutouts, LED viewing windows, snap-fit lid, and debossed Yamaha logo.
2-layer FR4, 60×40 mm, ENIG finish. Solid ground plane for EMI management. Matched-length CAN differential pair routing. Decoupling within 1 mm of each IC power pin.
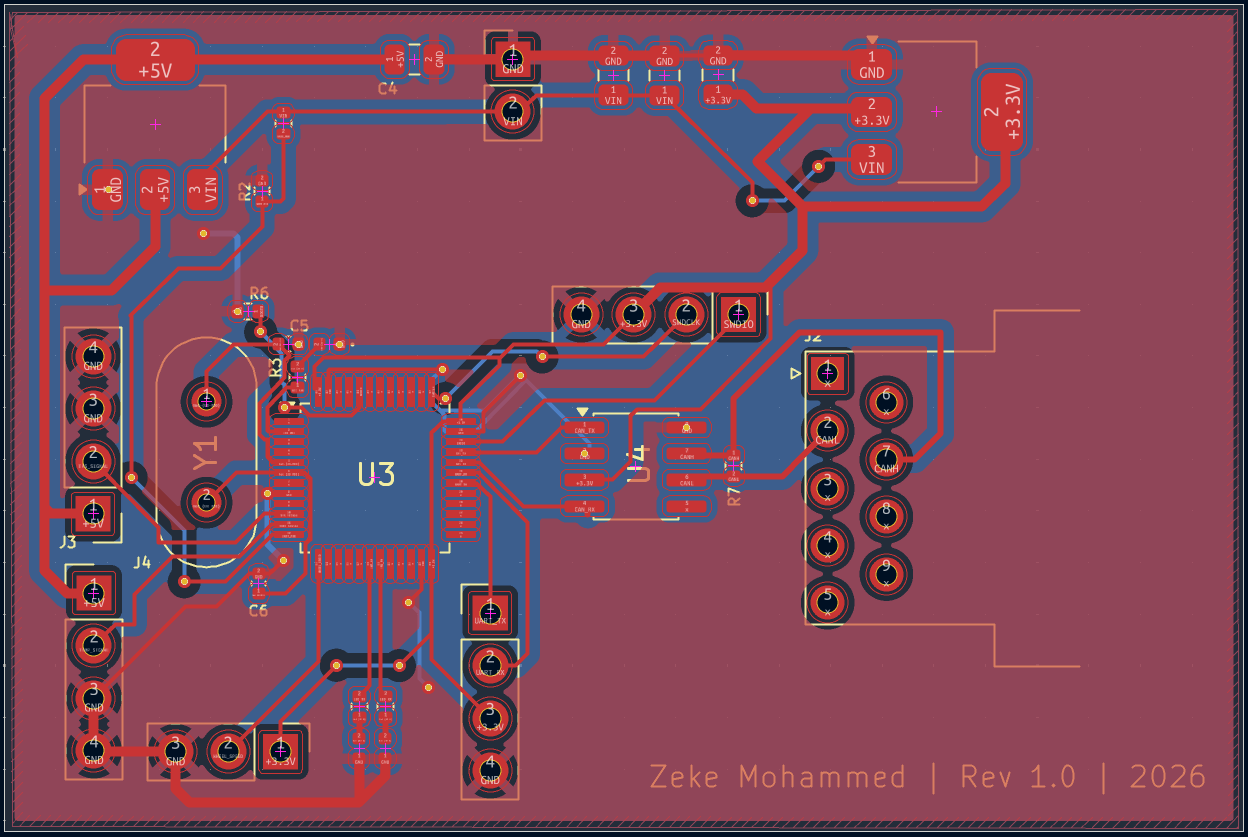
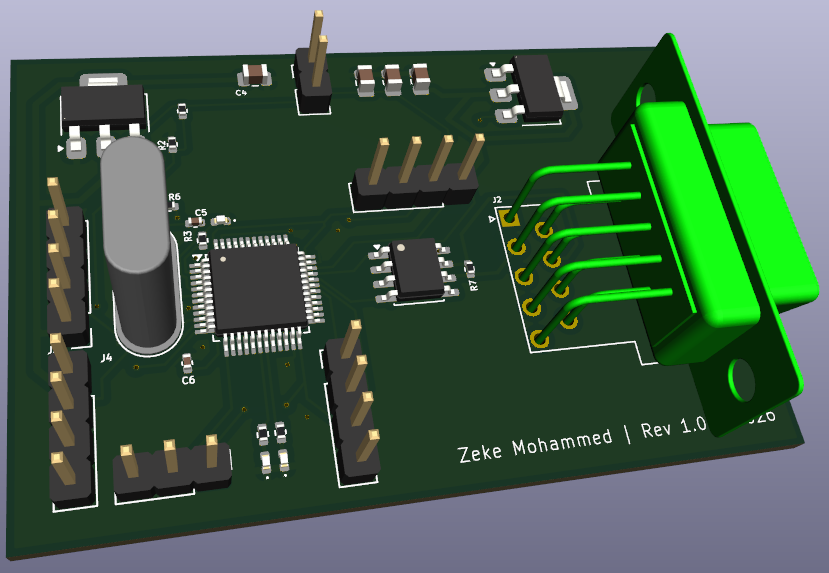
STM32F103C8T6 with integrated bxCAN 2.0B controller. SN65HVD230 CAN transceiver with ±16 kV ESD protection. Dual LDO power architecture — separate 5 V sensor excitation and 3.3 V logic rails. 120 Ω CAN termination per ISO 11898.
| Bytes | Data | Format |
|---|---|---|
| 0–1 | Throttle position | uint16, 0–1000 (0–100.0%) |
| 2–3 | Coolant temperature | int16, 0.1°C units |
| 4–5 | Wheel speed | uint16, 0.1 km/h |
| 6–7 | Battery voltage | uint16, 0.01 V units |
The STM32F103C8T6 was chosen over an MCP2515+ATmega approach because the STM32 integrates a bxCAN 2.0B controller directly on-chip, eliminating an external CAN controller IC, reducing board area, simplifying the BOM, and enabling hardware message filtering without CPU overhead. The SN65HVD230 transceiver was selected over the MCP2551 for native 3.3 V operation—matching the STM32 logic level without level shifting—and for its ±16 kV ESD protection, which is critical in a vehicle environment with transient voltage spikes from inductive loads.
Multi-protocol vehicle telemetry system built on ESP32, integrating GPS positioning via UART and live ECU data over Bluetooth Classic OBD-II (ISO 15765-4 CAN). Cross-validates GPS speed against ECU-reported speed in real time. Displays RPM, coolant temperature, throttle position, and dual speed sources on an embedded OLED.
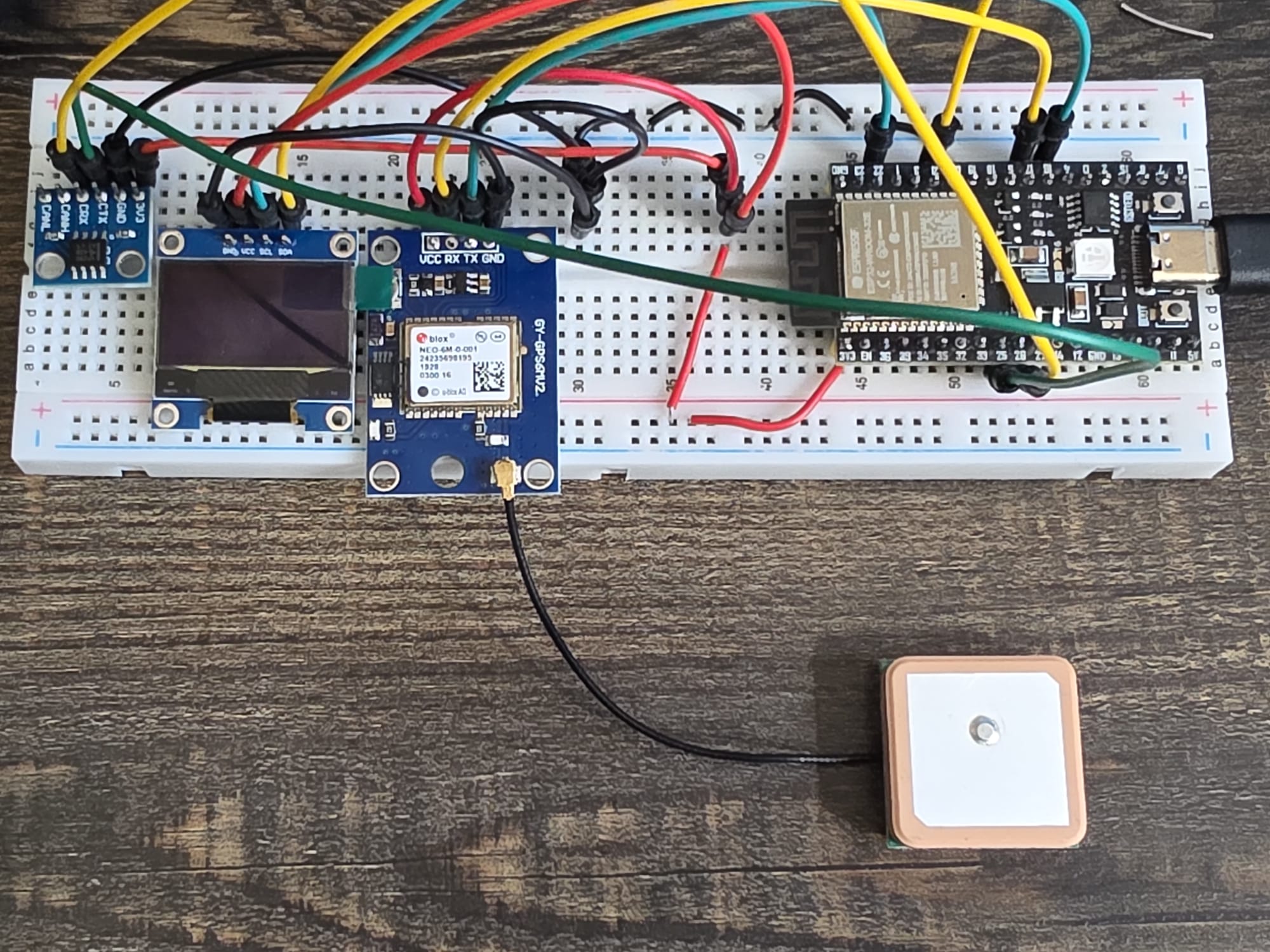
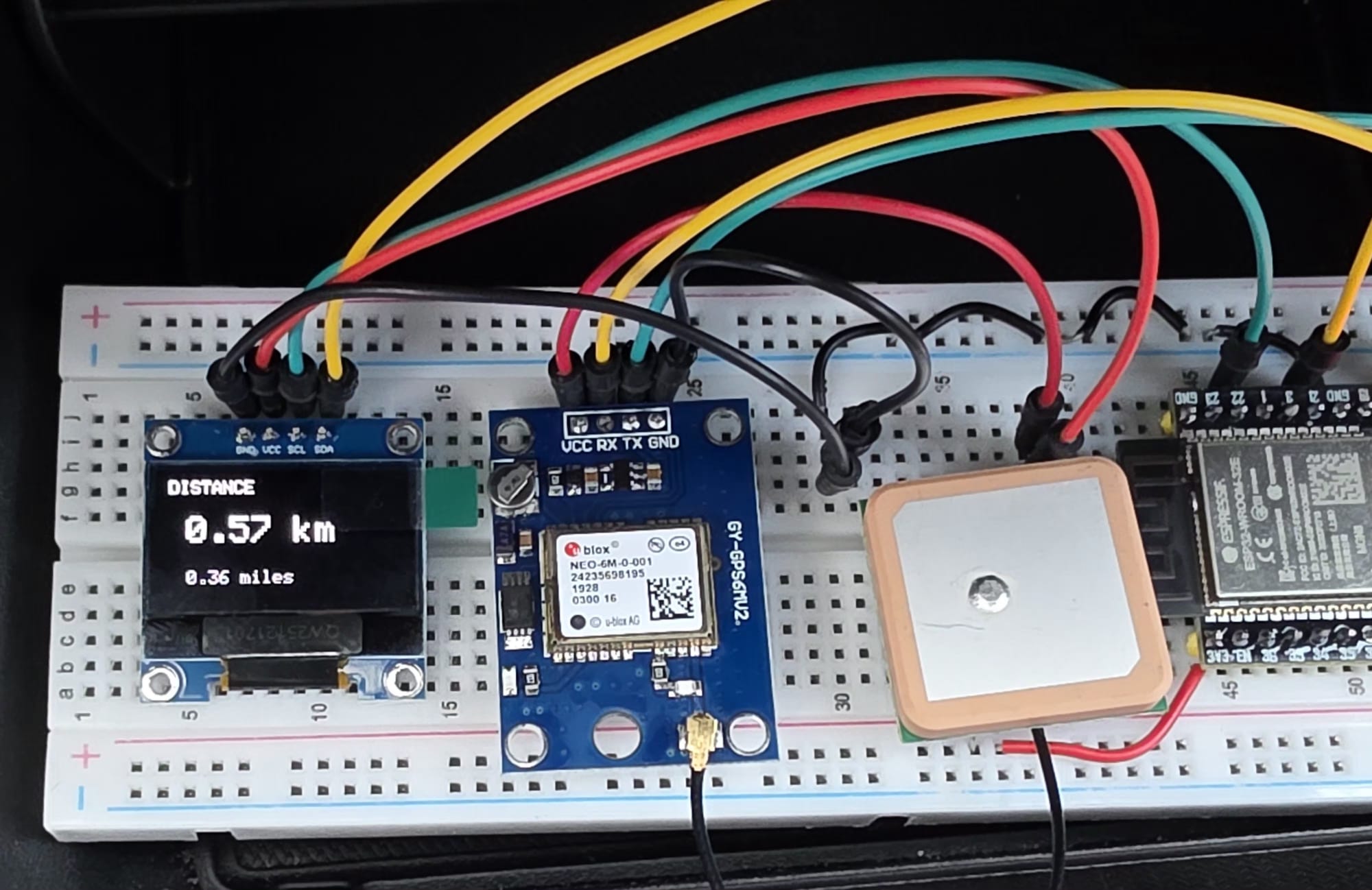
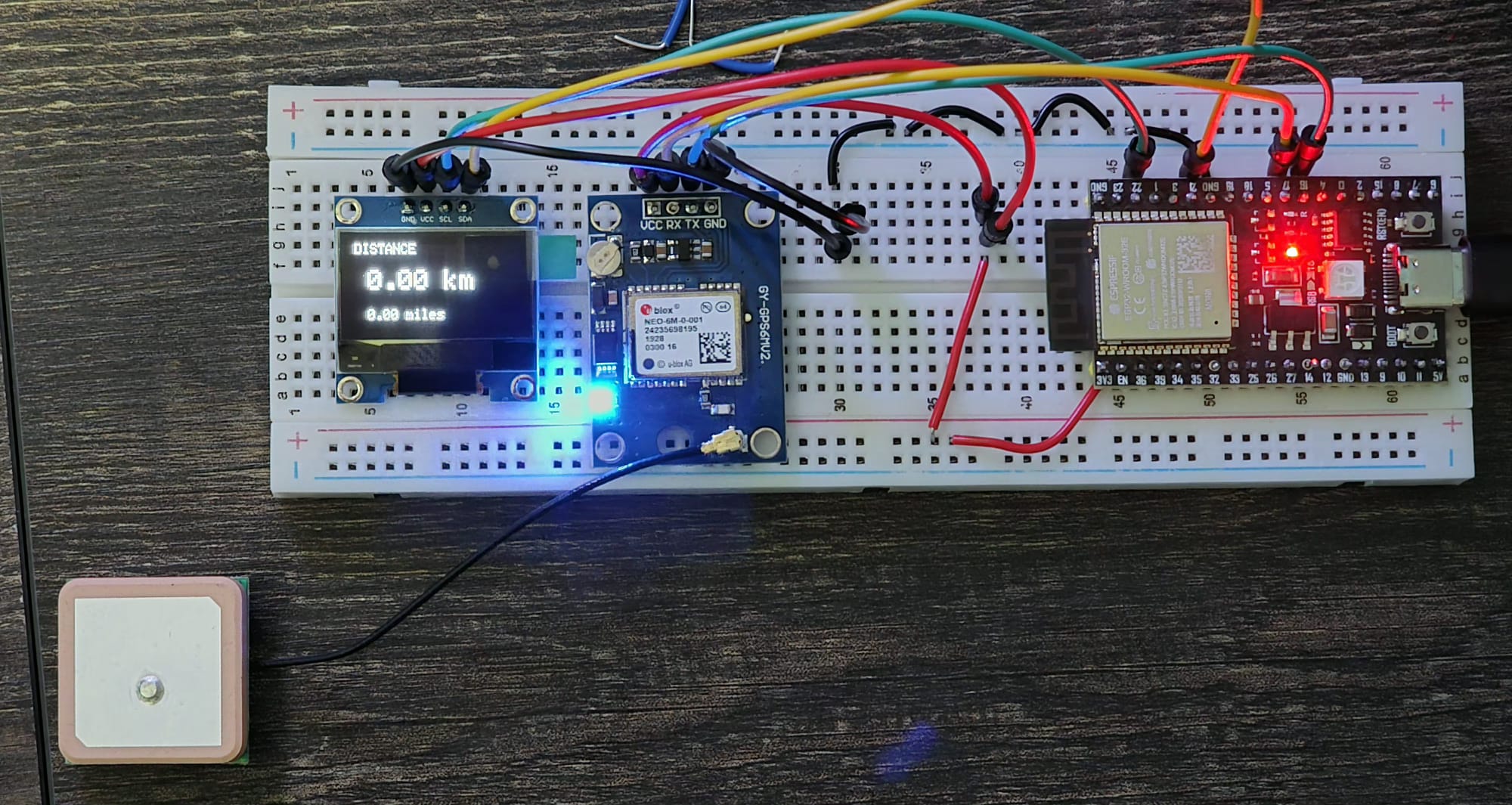
NEO-6M GPS module over UART with NMEA parsing via TinyGPS++. Veepeak Mini Bluetooth Classic OBD-II adapter connected via ESP32 Bluetooth SPP with PIN authentication. SSD1306 128×64 OLED over I2C at address 0x3C. Haversine formula for real-time distance calculation. Five cycling display screens: dual speed, RPM, max speed, distance, and engine data.
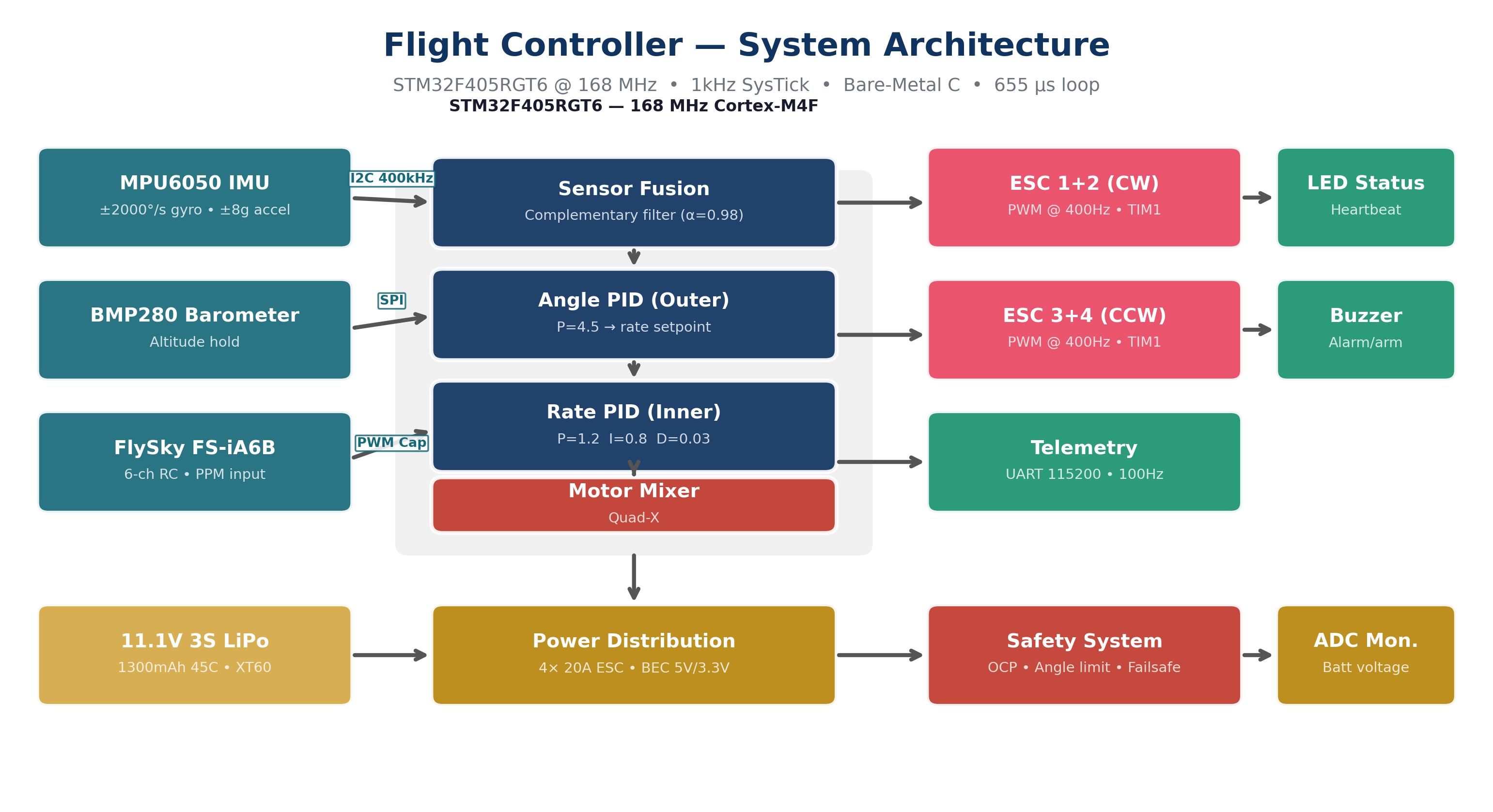
Bare-metal flight controller firmware on STM32F405RGT6 (168 MHz Cortex-M4F). Cascaded PID control — inner rate loop and outer angle loop — driven by SysTick at 1 kHz. Complementary filter fuses MPU6050 gyroscope and accelerometer data. Power system: 11.1 V 3S LiPo through XT60 to four 20A BLHeli_S ESCs.
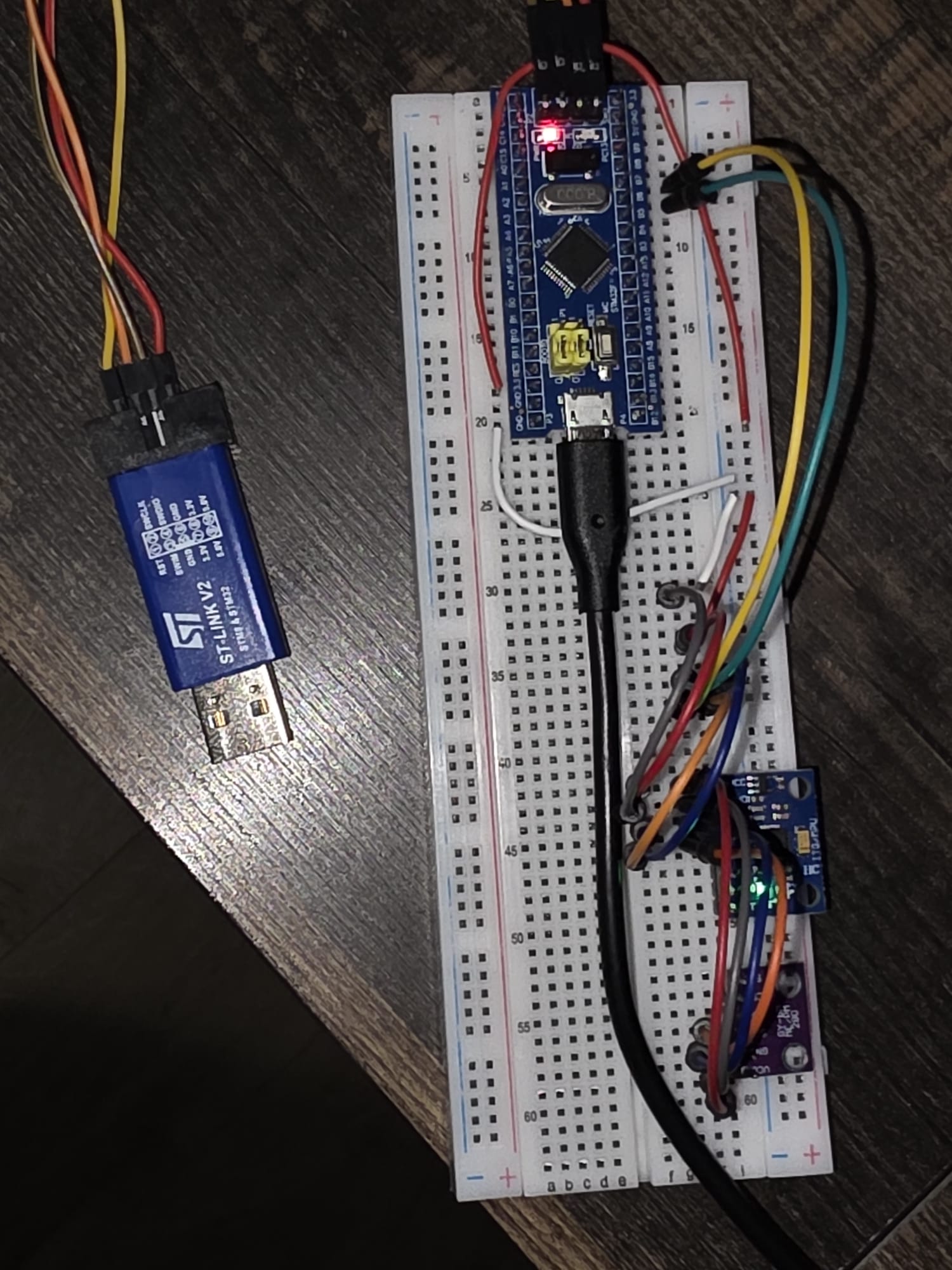
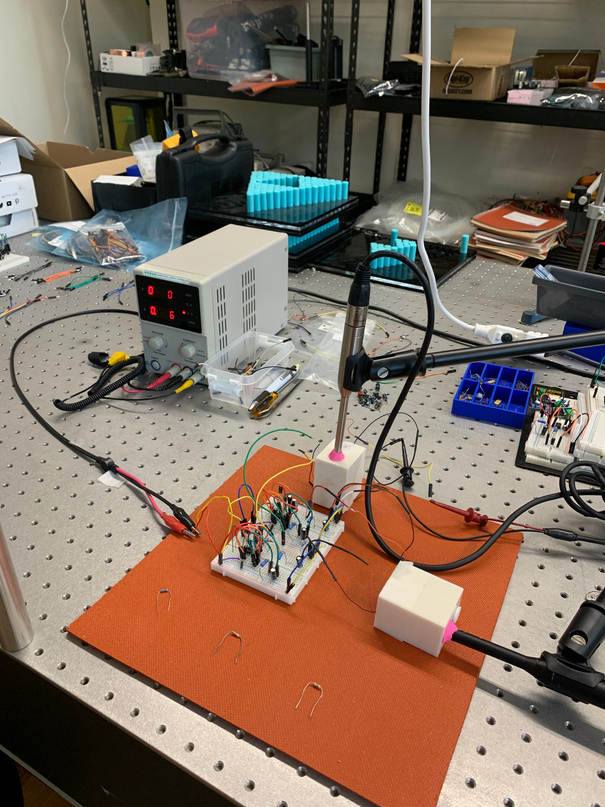
Rebuilt a bench demonstration on STM32F103 Blue Pill with MPU-6050 and BMP280, confirming real-time roll/pitch/yaw attitude estimation, barometric altitude, and PID motor output via I2C sensor fusion. Flashed via SWD using ST-Link V2.
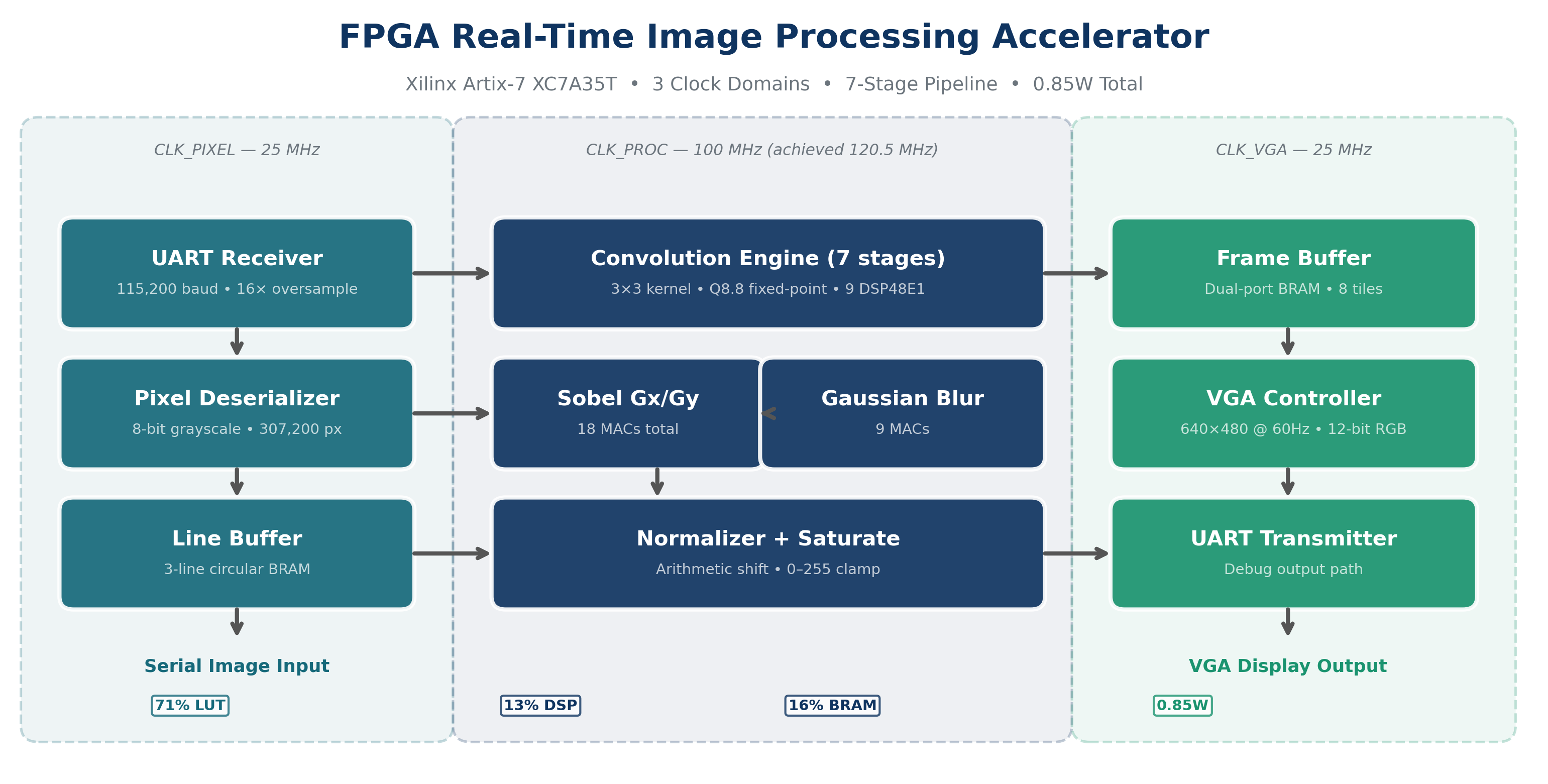
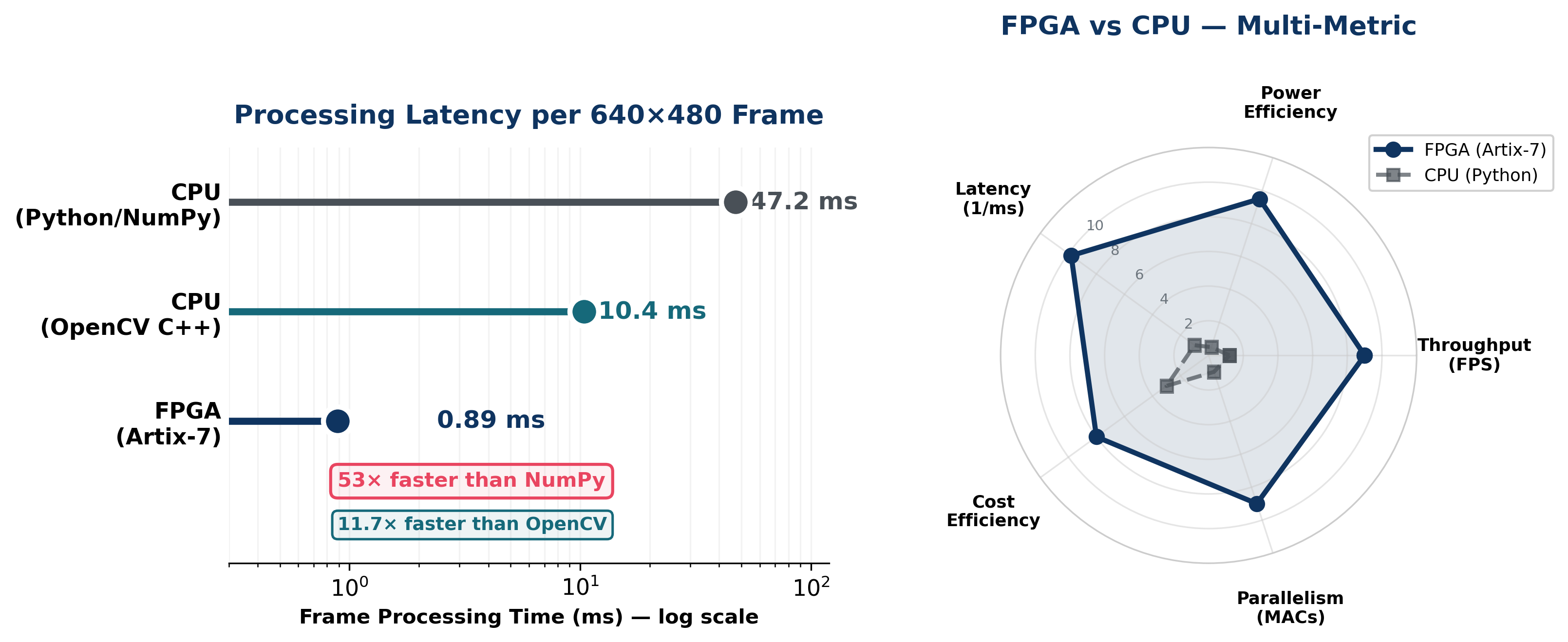
7-stage pipelined convolution engine on a Xilinx Artix-7 XC7A35T (Basys 3). Implements Sobel edge detection and Gaussian blur using a systolic array with fixed-point Q8.8 arithmetic. Three clock domains with CDC synchronizers. Triple-line circular BRAM buffer streams 3×3 windows without full-frame storage.
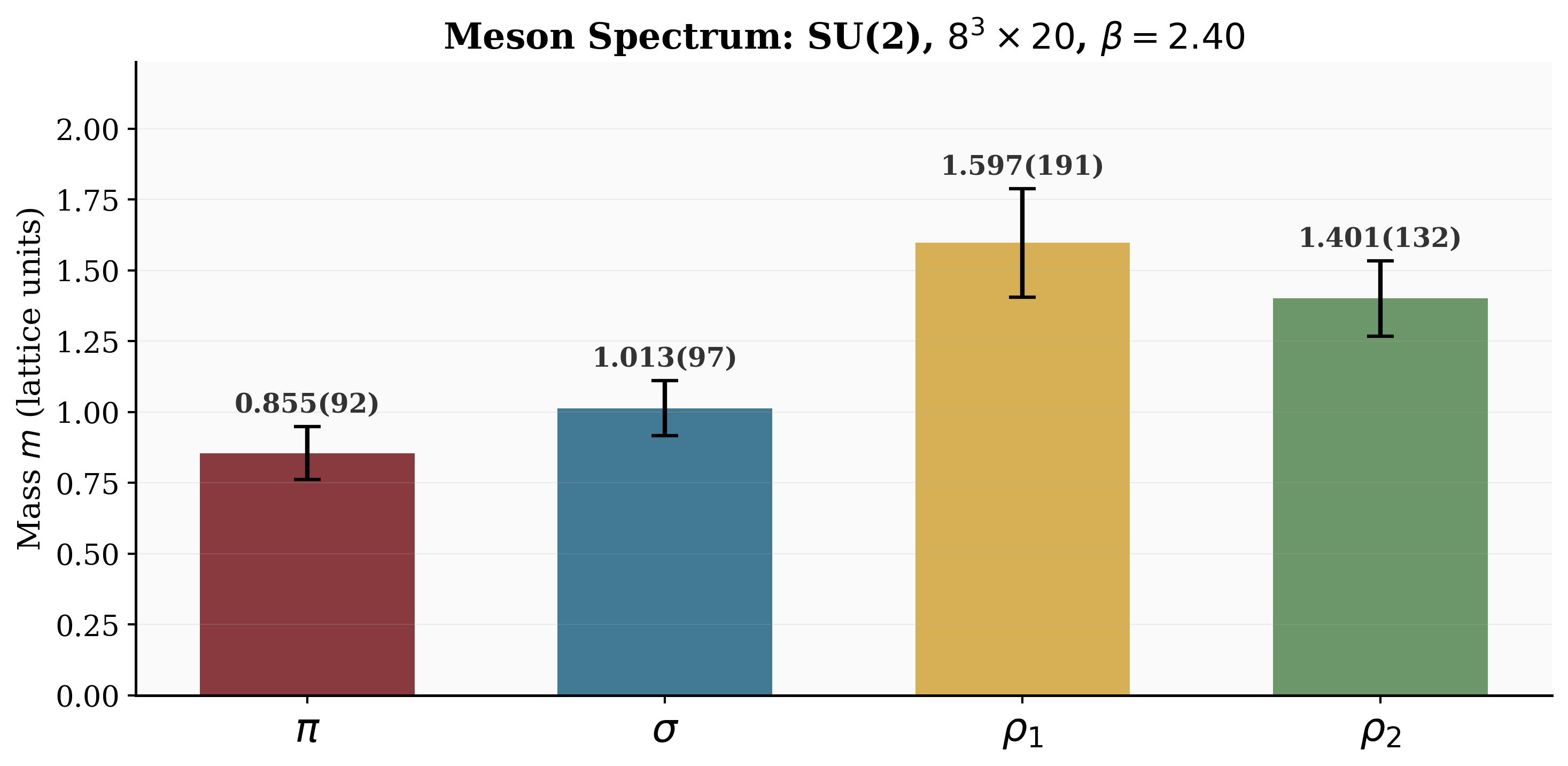
Undergraduate Researcher | Advisor: Dr. Christopher Aubin, Fordham University | Aug 2024 – Present
First-principles computation of the meson mass spectrum using SU(2) lattice gauge theory on an 8³×20 lattice. Built the entire simulation pipeline from scratch in Python: gauge field generation via Metropolis and heatbath algorithms, construction and inversion of the 81,920×81,920 Wilson–Dirac operator using BiCGSTAB/GMRES solvers, and mass extraction via effective mass plateaus with jackknife error estimation.
B.S. Engineering Physics (Electrical Concentration) | Minor in Mathematics
Sarah Colman Klemmer Research Fellow | Sigma Xi | SIAM | CSTEP Scholar
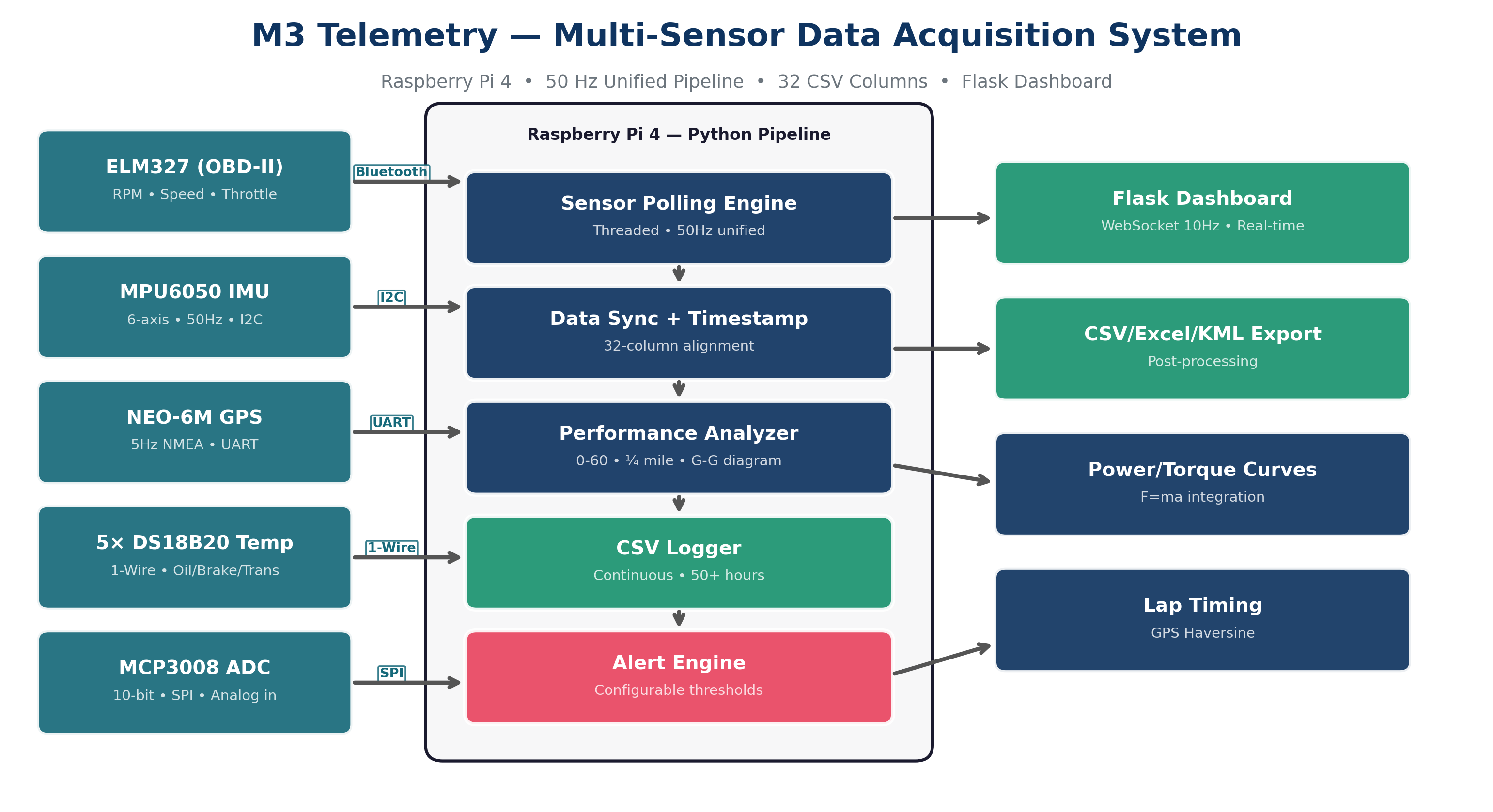
12+ sensor vehicle data acquisition on Raspberry Pi. CAN/I2C/UART integration with Flask telemetry dashboard. <2% measurement error over 50+ hours.
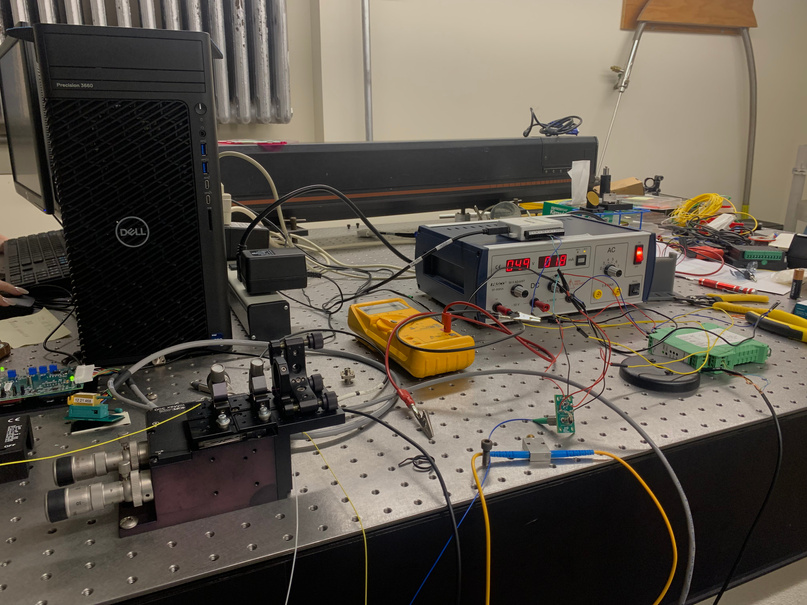
SolidWorks CAD assemblies with BOM/GD&T. LM386 amplifier frequency response characterization. Fiber optic sensors with NI DAQ. Arduino solar tracking system.